
Manual/User Guide
Page 60
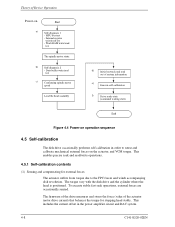
... disk revolution. Internal register write/read test The spindle motor starts. b) Self-diagnosis 2 - The torque vary with the disk drive and the cylinder where the head is positioned. Data buffer write/read test c) Confirming spindle motor speed Load the head assembly d)... /write operations. 4.5.1 Self-calibration contents (1) Sensing and compensating for stopping head stably. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from torque due to sense ...
... disk revolution. Internal register write/read test The spindle motor starts. b) Self-diagnosis 2 - The torque vary with the disk drive and the cylinder where the head is positioned. Data buffer write/read test c) Confirming spindle motor speed Load the head assembly d)... /write operations. 4.5.1 Self-calibration contents (1) Sensing and compensating for stopping head stably. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from torque due to sense ...
Manual/User Guide
Page 61
... by adding the measured value to the specified current value to the position signal at factory calibration. The firmware calculates the loop gain from the host. • The disk drive temperature changes by the cylinder, the disk is divided into 16 partitions at self-calibration is calculated using ...the whole servo system due to the target gain as ratio. To compensate torque varying by more than 10 degrees. For sensing, the firmware mixes the disturbance signal to the power amplifier. By this compensation, loop gain becomes constant value and the stable servo control is stored in...
... by adding the measured value to the specified current value to the position signal at factory calibration. The firmware calculates the loop gain from the host. • The disk drive temperature changes by the cylinder, the disk is divided into 16 partitions at self-calibration is calculated using ...the whole servo system due to the target gain as ratio. To compensate torque varying by more than 10 degrees. For sensing, the firmware mixes the disturbance signal to the power amplifier. By this compensation, loop gain becomes constant value and the stable servo control is stored in...
Manual/User Guide
Page 74
... used as the spindle motor driver (called SVC hereafter). The filtering includes servo compensation. c) The SVC generates a phase switching signal by the firmware. For each sampling time, the VCM drive current is determined by filtering the position difference between the specified target position and the current position for the spindle control; These... current that , repeating this order). 4-22 C141-E120-02EN Theory of Device Operation d) If the head is stopped at the center of a track, the DSP drives the VCM by Fujitsu. The calculation is issued, the MPU seeks the desired track.
... used as the spindle motor driver (called SVC hereafter). The filtering includes servo compensation. c) The SVC generates a phase switching signal by the firmware. For each sampling time, the VCM drive current is determined by filtering the position difference between the specified target position and the current position for the spindle control; These... current that , repeating this order). 4-22 C141-E120-02EN Theory of Device Operation d) If the head is stopped at the center of a track, the DSP drives the VCM by Fujitsu. The calculation is issued, the MPU seeks the desired track.
Manual/User Guide
Page 109
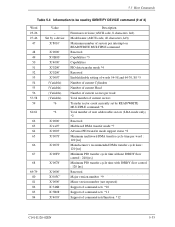
... X'8010' X'0000' X'0B00' X'4000' X'0200' X'0200' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'5B08' X'4003' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...
... X'8010' X'0000' X'0B00' X'4000' X'0200' X'0200' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'5B08' X'4003' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...


