

Manual/User Guide
Page 61
... VCM torque. To execute stable fast seek operations, external forces are occasionally sensed. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from Actuator lock d) .... 4.5.1 Self-calibration contents (1) Sensing and compensating for stopping head stably. b) Self-diagnosis 2 - The torque vary with the disk drive and the cylinder where the head is positioned. Internal register write/read test The spindle motor starts. MPU bus test - This includes the...
... VCM torque. To execute stable fast seek operations, external forces are occasionally sensed. The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for external forces The actuator suffers from Actuator lock d) .... 4.5.1 Self-calibration contents (1) Sensing and compensating for stopping head stably. b) Self-diagnosis 2 - The torque vary with the disk drive and the cylinder where the head is positioned. Internal register write/read test The spindle motor starts. MPU bus test - This includes the...

Manual/User Guide
Page 62
... the power amplifier. By this compensation, loop gain becomes constant value and the stable servo control is shown in Table 4.1. The disk drive performs self-calibration according to the target gain as ratio. The timechart is realized. The compensation value at the state that . After poweron...and about every 30 minutes after that the head is measured for each partition. This makes the stable servo control. For sensing, the firmware mixes the disturbance signal to most inner to the position signal at self-calibration is calculated using the value in the SA cylinder. (2)...
... the power amplifier. By this compensation, loop gain becomes constant value and the stable servo control is shown in Table 4.1. The disk drive performs self-calibration according to the target gain as ratio. The timechart is realized. The compensation value at the state that . After poweron...and about every 30 minutes after that the head is measured for each partition. This makes the stable servo control. For sensing, the firmware mixes the disturbance signal to most inner to the position signal at self-calibration is calculated using the value in the SA cylinder. (2)...
Manual/User Guide
Page 75
... specified target position and the current position for each sampling time, the VCM drive current is controlled by the firmware. The filtering includes servo compensation. c) The SVC generates a phase switching signal by Fujitsu. The MPU calculates the difference (speed error) between the target position and ...To position the head at the reference cylinder from the host, the MPU confirms the necessity of a track, the DSP drives the VCM by the firmware. 4.7.5 Spindle motor control Hall-less three-phase twelve-pole motor is used as the spindle motor driver (called SVC hereafter...
... specified target position and the current position for each sampling time, the VCM drive current is controlled by the firmware. The filtering includes servo compensation. c) The SVC generates a phase switching signal by Fujitsu. The MPU calculates the difference (speed error) between the target position and ...To position the head at the reference cylinder from the host, the MPU confirms the necessity of a track, the DSP drives the VCM by the firmware. 4.7.5 Spindle motor control Hall-less three-phase twelve-pole motor is used as the spindle motor driver (called SVC hereafter...
Manual/User Guide
Page 110
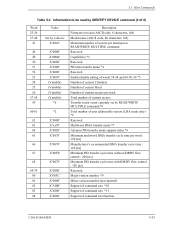
... with IORDY flow control : 120 [ns] Reserved Major version number *9 Minor version number (not reported) Support of command sets *10 Support of command sets *11 Support of 8) Word 23-26 27-46 47 48 49 50 51 52 53 54 55 56 ...' X'0000' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'4008' X'4000' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...
... with IORDY flow control : 120 [ns] Reserved Major version number *9 Minor version number (not reported) Support of command sets *10 Support of command sets *11 Support of 8) Word 23-26 27-46 47 48 49 50 51 52 53 54 55 56 ...' X'0000' X'0007' (Variable) (Variable) (Variable) (Variable) *6 *2 X'0000' X'xx07' X'0003' X'0078' X'0078' X'00F0' X'0078' X'0000' X'003C' X'0000' X'346B' X'4008' X'4000' Description Firmware revision (ASCII code, 8 characters, left) Model name (ASCII code, 40 characters, left) Maximum number of sectors per interrupt on READ/WRITE MULTIPLE command Reserved Capabilities...


