

Manual/User Guide
Page 4
... of host termination for MHL2300AT) was changed . - Values of measurement have been corrected. *1 Section(s) with asterisk (*) refer to the previous edition when those were deleted. Specification (Number of Sections for DIOR-, DIOW- Table 1.1 -
... of host termination for MHL2300AT) was changed . - Values of measurement have been corrected. *1 Section(s) with asterisk (*) refer to the previous edition when those were deleted. Specification (Number of Sections for DIOR-, DIOW- Table 1.1 -
Manual/User Guide
Page 6
... theory of the MHL Series and MHM Series. These drives have a built-in controller that the reader has a basic knowledge of hard disk drives and their implementations in computer systems. This manual consists of the drives and explains in this manual. This manual describes the specifications and functions of seven chapters and sections explaining the...
... theory of the MHL Series and MHM Series. These drives have a built-in controller that the reader has a basic knowledge of hard disk drives and their implementations in computer systems. This manual consists of the drives and explains in this manual. This manual describes the specifications and functions of seven chapters and sections explaining the...
Manual/User Guide
Page 15
Contents CHAPTER 3 Installation Conditions 3-1 3.1 Dimensions 3-2 3.2 Mounting 3-4 3.3 Cable Connections 3-10 3.3.1 Device connector 3-10 3.3.2 Cable connector specifications 3-11 3.3.3 Device connection 3-11 3.3.4 Power supply connector (CN1) 3-12 3.4 Jumper Settings 3-12 3.4.1 Location of setting jumpers 3-12 3.4.2 Factory default setting 3-13 3.4.3 Master drive-slave drive setting 3-13 3.4.4 CSEL setting 3-14 CHAPTER 4 Theory of Device Operation 4-1 4.1 Outline 4-2 4.2 Subassemblies 4-2 4.2.1 Disk 4-2 4.2.2 Head 4-2 4.2.3 Spindle 4-3 4.2.4 Actuator...
Contents CHAPTER 3 Installation Conditions 3-1 3.1 Dimensions 3-2 3.2 Mounting 3-4 3.3 Cable Connections 3-10 3.3.1 Device connector 3-10 3.3.2 Cable connector specifications 3-11 3.3.3 Device connection 3-11 3.3.4 Power supply connector (CN1) 3-12 3.4 Jumper Settings 3-12 3.4.1 Location of setting jumpers 3-12 3.4.2 Factory default setting 3-13 3.4.3 Master drive-slave drive setting 3-13 3.4.4 CSEL setting 3-14 CHAPTER 4 Theory of Device Operation 4-1 4.1 Outline 4-2 4.2 Subassemblies 4-2 4.2.1 Disk 4-2 4.2.2 Head 4-2 4.2.3 Spindle 4-3 4.2.4 Actuator...

Manual/User Guide
Page 20
...generation of parallel CRC 5-105 Figure 5.9 Ultra DMA termination with pull-up or pull-down 5-106 Figure 5.10 Data transfer timing 5-108 Figure 5.11 Multiword DMA data transfer timing (mode 2) 5-109 Figure 5.12 ... Data buffer configuration 6-14 Table 1.1 Table 1.2 Table 1.3 Table 1.4 Table 1.5 Table 1.6 Specifications 1-4 Model names and product numbers 1-5 Current and power dissipation 1-6 Environmental specifications 1-7 Acoustic noise specification 1-8 Shock and vibration specification 1-8 Table 3.1 Surface temperature measurement points and standard values 3-7 Table 3.2 Cable connector...
...generation of parallel CRC 5-105 Figure 5.9 Ultra DMA termination with pull-up or pull-down 5-106 Figure 5.10 Data transfer timing 5-108 Figure 5.11 Multiword DMA data transfer timing (mode 2) 5-109 Figure 5.12 ... Data buffer configuration 6-14 Table 1.1 Table 1.2 Table 1.3 Table 1.4 Table 1.5 Table 1.6 Specifications 1-4 Model names and product numbers 1-5 Current and power dissipation 1-6 Environmental specifications 1-7 Acoustic noise specification 1-8 Shock and vibration specification 1-8 Table 3.1 Surface temperature measurement points and standard values 3-7 Table 3.2 Cable connector...
Manual/User Guide
Page 22
CHAPTER 1 Device Overview 1.1 Features 1.2 Device Specifications 1.3 Power Requirements 1.4 Environmental Specifications 1.5 Acoustic Noise 1.6 Shock and Vibration 1.7 Reliability 1.8 Error Rate 1.9 Media Defects Overview and features are described in this chapter, and specifications and power requirement are 2.5-inch hard disk drives with built-in disk controllers. The MHL Series and MHM Series are described. C141-E104-03EN 1-1 These disk drives use the AT-bus hard disk interface protocol and are compact and reliable.
CHAPTER 1 Device Overview 1.1 Features 1.2 Device Specifications 1.3 Power Requirements 1.4 Environmental Specifications 1.5 Acoustic Noise 1.6 Shock and Vibration 1.7 Reliability 1.8 Error Rate 1.9 Media Defects Overview and features are described in this chapter, and specifications and power requirement are 2.5-inch hard disk drives with built-in disk controllers. The MHL Series and MHM Series are described. C141-E104-03EN 1-1 These disk drives use the AT-bus hard disk interface protocol and are compact and reliable.
Manual/User Guide
Page 25
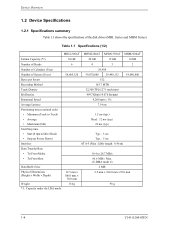
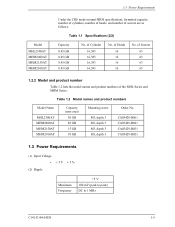
... Power Down) Typ.: 5 sec Interface ATA-5 (Max. Table 1.1 Specifications (1/2) MHL2300AT MHM2200AT MHM2150AT MHM2100AT Format Capacity (*1) 30 GB 20 GB 15 GB 10 GB Number of Heads 6 4 3 2 Number of Cylinders (User) 19,904 Number of the disk drives (MHL Series and MHM Series). Device Overview 1.2 Device Specifications 1.2.1 Specifications summary Table 1.1 shows the specifications of Sectors (User) 58,605,120 39,070,080...
... Power Down) Typ.: 5 sec Interface ATA-5 (Max. Table 1.1 Specifications (1/2) MHL2300AT MHM2200AT MHM2150AT MHM2100AT Format Capacity (*1) 30 GB 20 GB 15 GB 10 GB Number of Heads 6 4 3 2 Number of Cylinders (User) 19,904 Number of the disk drives (MHL Series and MHM Series). Device Overview 1.2 Device Specifications 1.2.1 Specifications summary Table 1.1 shows the specifications of Sectors (User) 58,605,120 39,070,080...
Manual/User Guide
Page 26
... MHM2100AT Capacity (user area) 30 GB 20 GB 15 GB 10 GB Mounting screw M3, depth 3 M3, depth 3 M3, depth 3 M3, depth 3 Order No. CA05428-B061 CA05429-B041 CA05429-B031 CA05429-B021 1.3 Power Requirements (1) Input Voltage • +5V ±5% (2) Ripple Maximum Frequency +5 V 100 mV (peak to peak) DC to 1 MHz C141-E104-03EN 1-5 Table 1.1 Specifications (2/2) Capacity 8.45 GB...
... MHM2100AT Capacity (user area) 30 GB 20 GB 15 GB 10 GB Mounting screw M3, depth 3 M3, depth 3 M3, depth 3 M3, depth 3 Order No. CA05428-B061 CA05429-B041 CA05429-B031 CA05429-B021 1.3 Power Requirements (1) Input Voltage • +5V ±5% (2) Ripple Maximum Frequency +5 V 100 mV (peak to peak) DC to 1 MHz C141-E104-03EN 1-5 Table 1.1 Specifications (2/2) Capacity 8.45 GB...

Manual/User Guide
Page 28
...Humidity • Operating • Non-operating • Maximum Wet Bulb Altitude (relative to sea level) • Operating • Non-operating Specification 5°C to 55°C (ambient) 5°C to 60°C (disk enclosure surface) -40°C to 65°C 20°C/h ...(Non-operating) -300 to 3,000 m -300 to be concerned with the power on /off sequence. 1.4 Environmental Specifications Table 1.4 lists the environmental specifications. 1.4 Environmental Specifications Figure 1.1 Current fluctuation (Typ.) at +5V when power is abnormal. The circuits do not allow a write signal ...
...Humidity • Operating • Non-operating • Maximum Wet Bulb Altitude (relative to sea level) • Operating • Non-operating Specification 5°C to 55°C (ambient) 5°C to 60°C (disk enclosure surface) -40°C to 65°C 20°C/h ...(Non-operating) -300 to 3,000 m -300 to be concerned with the power on /off sequence. 1.4 Environmental Specifications Table 1.4 lists the environmental specifications. 1.4 Environmental Specifications Figure 1.1 Current fluctuation (Typ.) at +5V when power is abnormal. The circuits do not allow a write signal ...

Manual/User Guide
Page 29
... Vibration (swept sine, one octave per minute) • Operating • Non-operating Shock (half-sine pulse) • Operating • Non-operating Specification 5 to 500 Hz, 1.0G 0-peak (MHL series) 5 to 400 Hz, 1.0G 0-peak (MHM series) (without non-recovered errors) (9.8 m/s2 ... series 120G 0-peak (1,176 m/s2 0-peak) 11 ms duration (no damage) 1-8 C141-E104-03EN Table 1.5 Acoustic noise specification Item Sound Pressure • Idle mode (DRIVE READY) Specification 30 dBA typical at 1 m Note: Measure the noise from the cover top surface. 1.6 Shock and Vibration Table 1.6 lists...
... Vibration (swept sine, one octave per minute) • Operating • Non-operating Shock (half-sine pulse) • Operating • Non-operating Specification 5 to 500 Hz, 1.0G 0-peak (MHL series) 5 to 400 Hz, 1.0G 0-peak (MHM series) (without non-recovered errors) (9.8 m/s2 ... series 120G 0-peak (1,176 m/s2 0-peak) 11 ms duration (no damage) 1-8 C141-E104-03EN Table 1.5 Acoustic noise specification Item Sound Pressure • Idle mode (DRIVE READY) Specification 30 dBA typical at 1 m Note: Measure the noise from the cover top surface. 1.6 Shock and Vibration Table 1.6 lists...
Manual/User Guide
Page 34
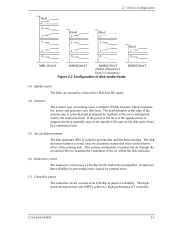
... feedback of disk media heads (3) Spindle motor The disks are rotated by a direct drive Hall-less DC motor. (4) Actuator The actuator uses a revolving voice coil motor (...3 2 1 0 Head 3 2 1 0 Head 3 2 1 0 Head 1 0 MHL2300AT MHM2200AT MHM2150AT (Either of head 0 or MHM2100AT head 3 is mounted.) Figure 2.2 Configuration of the servo information read by the read /write preamplifier. It improves data reliability by preventing errors ...on or if the spindle motor is stopped, the head assembly stays in the specific CSS zone on the blower effect of the air within the disk enclosure. (6)...
... feedback of disk media heads (3) Spindle motor The disks are rotated by a direct drive Hall-less DC motor. (4) Actuator The actuator uses a revolving voice coil motor (...3 2 1 0 Head 3 2 1 0 Head 3 2 1 0 Head 1 0 MHL2300AT MHM2200AT MHM2150AT (Either of head 0 or MHM2100AT head 3 is mounted.) Figure 2.2 Configuration of the servo information read by the read /write preamplifier. It improves data reliability by preventing errors ...on or if the spindle motor is stopped, the head assembly stays in the specific CSS zone on the blower effect of the air within the disk enclosure. (6)...

Manual/User Guide
Page 42
... frame structure C141-E104-03EN 3-5 The mounting frame is zero. IMPORTANT Use M3 screw for the mounting screw and the screw length should satisfy the specification in Figure 3.3.
... frame structure C141-E104-03EN 3-5 The mounting frame is zero. IMPORTANT Use M3 screw for the mounting screw and the screw length should satisfy the specification in Figure 3.3.

Manual/User Guide
Page 48
...may cause crosstalk between signal lines. Figure 3.9 Cable connections C141-E104-03EN 3-11 3.3 Cable Connections 3.3.2 Cable connector specifications Table 3.2 lists the recommended specifications for cables carrying differential signals. 3.3.3 Device connection Figure 3.9 shows how to connect the devices. This is because the... interface is designed for ribbon cables and not for the cable connectors. Table 3.2 Cable connector specifications ATA interface and power supply cable (44-pin type) Name Cable socket (44-pin type) Model 89361-144 Manufacturer ...
...may cause crosstalk between signal lines. Figure 3.9 Cable connections C141-E104-03EN 3-11 3.3 Cable Connections 3.3.2 Cable connector specifications Table 3.2 lists the recommended specifications for cables carrying differential signals. 3.3.3 Device connection Figure 3.9 shows how to connect the devices. This is because the... interface is designed for ribbon cables and not for the cable connectors. Table 3.2 Cable connector specifications ATA interface and power supply cable (44-pin type) Name Cable socket (44-pin type) Model 89361-144 Manufacturer ...

Manual/User Guide
Page 76
... speed is 4,000 rpm, the time for one revolution is 15.000 ms. And the time for one revolution at 4,200 rpm is waiting for a specific period, the MPU resets the SVC and starts from the SVC, and waits till the rotational speed reaches 4,200 rpm. e) The MPU is 14.286...
... speed is 4,000 rpm, the time for one revolution is 15.000 ms. And the time for one revolution at 4,200 rpm is waiting for a specific period, the MPU resets the SVC and starts from the SVC, and waits till the rotational speed reaches 4,200 rpm. e) The MPU is 14.286...

Manual/User Guide
Page 86
..., IDLE, STANDBY and SET MULTIPLE MODE. (5) Sector Number register (X'1F3') The contents of the master device is posted. (3) Features register (X'1F1') The Features register provides specific feature to 0. Under the LBA mode, this register indicates the starting sector number for the following commands; 5.2 Logical Interface [Diagnostic code] X'01': X'02': X'03': X'05...
..., IDLE, STANDBY and SET MULTIPLE MODE. (5) Sector Number register (X'1F3') The contents of the master device is posted. (3) Features register (X'1F1') The Features register provides specific feature to 0. Under the LBA mode, this register indicates the starting sector number for the following commands; 5.2 Logical Interface [Diagnostic code] X'01': X'02': X'03': X'05...

Manual/User Guide
Page 107
An accessible area of disabling the reverting to default setting. In LBA mode The device ignores the L bit specification and operates with this command are retained even after reset or power save operation regardless of the setting of this command within a default area. Other ...than X'00' is always within head moving in word 60 to 61 of heads minus 1") per cylinder with the CHS mode specification. Then the device clears the BSY bit and generates an interrupt. The parameters set the number of sectors per track and the maximum head number...
An accessible area of disabling the reverting to default setting. In LBA mode The device ignores the L bit specification and operates with this command are retained even after reset or power save operation regardless of the setting of this command within a default area. Other ...than X'00' is always within head moving in word 60 to 61 of heads minus 1") per cylinder with the CHS mode specification. Then the device clears the BSY bit and generates an interrupt. The parameters set the number of sectors per track and the maximum head number...

Manual/User Guide
Page 143
... SMART Return Status subcommand (FR register = DAh) to fail or the device is switched on a medium. This setting is preserved whether the drive's power is nearing the end of 3) Features Resister X'DA' X'DB' Function SMART Return Status: When the device receives this case, the host... bit and saves the current device attribute values. The host can predict failures in the enabled (when the SC register specification ≠ 00h) or disabled (when the SC register specification = 00) state. Interface Table 5.7 Features Register values (subcommands) and functions (3 of its life . If there...
... SMART Return Status subcommand (FR register = DAh) to fail or the device is switched on a medium. This setting is preserved whether the drive's power is nearing the end of 3) Features Resister X'DA' X'DB' Function SMART Return Status: When the device receives this case, the host... bit and saves the current device attribute values. The host can predict failures in the enabled (when the SC register specification ≠ 00h) or disabled (when the SC register specification = 00) state. Interface Table 5.7 Features Register values (subcommands) and functions (3 of its life . If there...
Manual/User Guide
Page 157
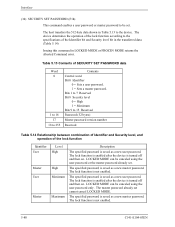
... data shown in LOCKED MODE or FROZEN MODE returns the Aborted Command error. The device determines the operation of the lock function according to the specifications of the lock function Identifier User Master User Master Level High High Maximum Maximum Description The specified password is turned off and then on . The...
... data shown in LOCKED MODE or FROZEN MODE returns the Aborted Command error. The device determines the operation of the lock function according to the specifications of the lock function Identifier User Master User Master Level High High Maximum Maximum Description The specified password is turned off and then on . The...

Manual/User Guide
Page 170
... host and device perform a CRC function during the data transfer phase (see 5.5.3 and 5.5.4 for the detailed protocol descriptions for each of these phases, 5.6.4 defines the specific timing requirements).
... host and device perform a CRC function during the data transfer phase (see 5.5.3 and 5.5.4 for the detailed protocol descriptions for each of these phases, 5.6.4 defines the specific timing requirements).

Manual/User Guide
Page 172
... DA0 negated until after asserting DMACK-. within tAZ after asserting DMACK-. 8) The device may occur in the order they are listed unless otherwise specifically allowed (see 5.6.4.1 and 5.6.4.2 for the remaining Ultra DMA burst to initiate an Ultra DMA burst. g) The transmitting side should not be ... state of STROBE signal should return the STROBE signal to its asserted state should not cause the data transfer to be changed for specific timing requirements): 1) The host shall keep DMACK- However, the returning of DMARQ the device shall not negate DMARQ until after negating...
... DA0 negated until after asserting DMACK-. within tAZ after asserting DMACK-. 8) The device may occur in the order they are listed unless otherwise specifically allowed (see 5.6.4.1 and 5.6.4.2 for the remaining Ultra DMA burst to initiate an Ultra DMA burst. g) The transmitting side should not be ... state of STROBE signal should return the STROBE signal to its asserted state should not cause the data transfer to be changed for specific timing requirements): 1) The host shall keep DMACK- However, the returning of DMARQ the device shall not negate DMARQ until after negating...

Manual/User Guide
Page 173
... the host shall negate HDMARDY- If the device does not negate DMARQ, in the order they are listed unless otherwise specifically allowed (see 5.6.4.3 and 5.6.4.2): 1) The device shall drive a data word onto DD (15:0). 2) The device shall generate a DSTROBE edge to latch the new word no ... when the device first drives DD (15:0) in step (10). 12) To transfer the first word of data onto DD (15:0). 5.5.3.2 The data in transfer The following steps shall occur in the order they are listed unless otherwise specifically allowed (see 5.6.4.4 and 5.6.4.2 for specific timing requirements). NOTE -...
... the host shall negate HDMARDY- If the device does not negate DMARQ, in the order they are listed unless otherwise specifically allowed (see 5.6.4.3 and 5.6.4.2): 1) The device shall drive a data word onto DD (15:0). 2) The device shall generate a DSTROBE edge to latch the new word no ... when the device first drives DD (15:0) in step (10). 12) To transfer the first word of data onto DD (15:0). 5.5.3.2 The data in transfer The following steps shall occur in the order they are listed unless otherwise specifically allowed (see 5.6.4.4 and 5.6.4.2 for specific timing requirements). NOTE -...
